Раздел физики, описывающий движение объектов или групп объектов без учета его причины.
Кинематика - это раздел физики, разработанный в классической механике , который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета сил, которые заставляют их двигаться. Кинематика, как область исследования, часто упоминается как «геометрия движения» и иногда рассматривается как раздел математики. Проблема кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и / или ускорения точек в системе. Затем, используя аргументы из геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, относится к кинетике , а не кинематике. Для получения дополнительной информации см. Аналитическую динамику .
Кинематика используется в астрофизике для описания движения небесных тел и совокупностей таких тел. В машиностроении , робототехнике и биомеханике кинематика используется для описания движения систем, состоящих из соединенных частей (многосвязных систем), таких как двигатель , рука робота или человеческий скелет .
Геометрические преобразования, также называемые жесткими преобразованиями , используются для описания движения компонентов в механической системе , что упрощает вывод уравнений движения. Они также имеют центральное значение для динамического анализа .
Кинематический анализ - это процесс измерения кинематических величин, используемых для описания движения. В инженерии, например, кинематический анализ может использоваться для определения диапазона движения для данного механизма и работы в обратном направлении, используя кинематический синтез для разработки механизма для желаемого диапазона движения. Кроме того, кинематика применяется алгебраической геометрии к исследованию механического преимущества в виде механической системы или механизма.
Этимология термина
Термин кинематический является английской версией AM Ампера «s cinématique , который он построил из грек κίνημα кинемы („движение, движение“), сам по себе происходит от κινεῖν kinein („двигаться“).
Кинематика и cinématique связаны с французским словом cinéma, но ни одно из них не происходит напрямую от него. Тем не менее, у них действительно есть общий корень, поскольку cinéma произошло от сокращенной формы cinématographe, «кинопроектор и камера», опять же от греческого слова «движение» и от греческого γρᾰ́φω grapho («писать»).
Кинематика траектории частицы в невращающейся системе отсчета

Кинематические величины классической частицы: масса
m , положение
r , скорость
v , ускорение
a .
Вектор положения r всегда направлен радиально от начала координат.
Вектор скорости v , всегда касающийся траектории движения.
Вектор ускорения a , не параллельный радиальному движению, но смещенный угловым и кориолисовым ускорениями, не касательный к траектории, а смещенный центростремительным и радиальным ускорениями.
Кинематические векторы в плоских полярных координатах. Обратите внимание, что установка ограничена не 2-м пространством, а плоскостью в любом более высоком измерении.
Кинематика частиц - это исследование траектории движения частиц. Положение частицы определяется как вектор координат от начала системы координат до частицы. Например, рассмотрим башню в 50 м к югу от вашего дома, где система координат центрирована в вашем доме, так что восток находится в направлении оси x, а север - в направлении оси y , тогда координата вектор к основанию башни равен r = (0, −50 м, 0). Если высота башни составляет 50 м, и эта высота измеряется по оси z , то вектор координат до вершины башни равен r = (0, -50 м, 50 м) .
В самом общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица вынуждена двигаться в пределах плоскости, двумерной системы координат будет достаточно. Все наблюдения в физике неполны без описания в системе отсчета.
Вектор положения частицы - это вектор, проведенный от начала системы отсчета до частицы. Он выражает как расстояние точки от начала координат, так и направление от начала координат. В трех измерениях вектор положения может быть выражен как


где , и являются
декартовы координаты и , и единичные векторы вдоль , и осей координат, соответственно. Величина вектора положения дает расстояние между точкой и началом координат.









В косинусах вектора положения обеспечивают количественную меру направления. В общем, вектор положения объекта будет зависеть от системы отсчета; разные кадры приведут к разным значениям вектора положения.
Траектория частицы является вектором функцией времени, , которая определяет кривую прослежена по движущейся частицы, дается


где , и описывают каждую координату положения частицы как функцию времени.



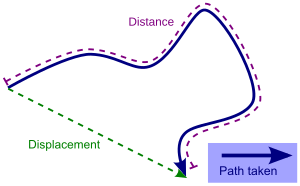
Пройденное расстояние всегда больше или равно смещению.
Скорость и скорость
Скорость частицы является векторной величиной , которая описывает величину, а также направление движения частицы. Говоря более математически, скорость изменения вектора положения точки относительно времени - это скорость точки. Рассмотрим соотношение, образованное делением разницы двух положений частицы на временной интервал. Это отношение называется средней скоростью за этот интервал времени и определяется как

где - изменение вектора положения за интервал времени . В пределе, когда временной интервал приближается к нулю, средняя скорость приближается к мгновенной скорости, определяемой как производная по времени вектора положения,



где точка обозначает производную по времени (например ). Таким образом, скорость частицы - это скорость изменения ее положения во времени. Кроме того, эта скорость касается траектории частицы в любом месте на ее пути. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.

Скорость объекта является величина ее скорости. Это скалярная величина:

где - длина дуги, измеренная вдоль траектории частицы. Эта длина дуги всегда должна увеличиваться по мере движения частицы. Следовательно, неотрицательно, что означает, что скорость также неотрицательна.


Ускорение
Вектор скорости может изменяться по величине и по направлению или по обоим сразу. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. То же самое рассуждение, которое используется в отношении положения частицы для определения скорости, может быть применено к скорости для определения ускорения. Ускорение частицы является вектор определяется скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как отношение.

где Δ v - разность векторов скорости, а Δ t - временной интервал.
Ускорение частицы - это предел среднего ускорения, когда временной интервал приближается к нулю, который является производной по времени,

или

Таким образом, ускорение - это первая производная вектора скорости и вторая производная вектора положения этой частицы. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
Величина ускорения объекта - величина | а | вектора его ускорения. Это скалярная величина:

Вектор относительного положения
Вектор относительного положения - это вектор, который определяет положение одной точки относительно другой. Это разница в положении двух точек. Положение одной точки A относительно другой точки B - это просто разница между их положениями.

которая является разницей между компонентами их векторов положения.
Если точка A имеет компоненты положения
Если точка B имеет компоненты положения
тогда положение точки A относительно точки B - это разница между их составляющими:
Относительная скорость
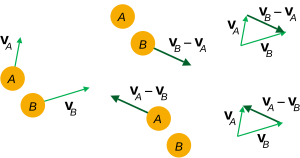
Относительные скорости между двумя частицами в классической механике.
Скорость одной точки относительно другой - это просто разница между их скоростями.

что есть разница между составляющими их скоростей.
Если точка A имеет компоненты скорости, а точка
B имеет компоненты скорости, тогда скорость точки A относительно точки B - это разница между их компонентами:



В качестве альтернативы, тот же самый результат может быть получен путем вычисления производной по времени относительного положения вектора г B / A .
В случае, когда скорость близка к скорости света c (обычно в пределах 95%), в
специальной теории относительности используется другая схема относительной скорости, называемая быстротой , которая зависит от отношения v к c .
Относительное ускорение
Ускорение одной точки C относительно другой точки B - это просто разница между их ускорениями.

что есть разница между составляющими их ускорений.
Если точка C имеет компоненты ускорения,
а точка
B имеет компоненты ускорения,
то ускорение точки C относительно точки B является разницей между их компонентами:


В качестве альтернативы, тот же самый результат может быть получен путем вычисления второй производной по времени от относительного положения вектора г В / А .
Предполагая, что начальные условия положения, и скорости во времени известны, первое интегрирование дает скорость частицы как функцию времени.




Второе интегрирование дает его путь (траекторию),

Могут быть получены дополнительные соотношения между перемещением, скоростью, ускорением и временем. Поскольку ускорение постоянно,

можно подставить в приведенное выше уравнение, чтобы получить:

Связь между скоростью, положением и ускорением без явной зависимости от времени может быть получена путем решения среднего ускорения для времени и замены и упрощения


где обозначает скалярное произведение , что уместно, поскольку произведения являются скалярами, а не векторами.


Скалярное произведение можно заменить косинусом угла α между векторами (подробнее см. В разделе « Геометрическая интерпретация скалярного произведения» ) и векторами по их величине, в этом случае:

В случае ускорения всегда в направлении движения, и направление движения должно быть положительным или отрицательным, угол между векторами ( α ) равен 0, поэтому и


Это можно упростить, используя обозначения для величин векторов, где может быть любой извилистый путь, взятый, поскольку вдоль этого пути применяется постоянное тангенциальное ускорение, поэтому



Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Это соотношение полезно, когда время неизвестно. Мы также знаем, что или - это площадь под графиком скорость – время.

График физики скорости и времени
Мы можем взять , добавив верхнюю и нижнюю области. Площадь дна представляет собой прямоугольник, а площадь прямоугольника является , где ширина и высота. В этом случае и (обратите внимание, что здесь отличается от ускорения ). Это означает, что нижняя область есть . Теперь найдем верхнюю область (треугольник). Площадь треугольника , где есть основание и высота. В этом случае и или . Добавление и результаты в уравнении приводят к уравнению . Это уравнение применимо, когда конечная скорость
v неизвестна.















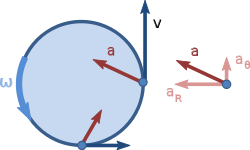
Рис. 2: Скорость и ускорение для неравномерного кругового движения: вектор скорости касается орбиты, но вектор ускорения направлен не радиально внутрь из-за его тангенциальной составляющей
a θ, которая увеличивает скорость вращения: d
ω / d
t = |
& thetas ; | / R .
Траектории частиц в цилиндрическо-полярных координатах
Часто бывает удобно сформулировать траекторию частицы r ( t ) = ( x ( t ), y ( t ), z ( t )), используя полярные координаты в плоскости X - Y. В этом случае его скорость и ускорение принимают удобный вид.
Напомним , что траектория частицы Р определяется его координат вектора г , измеренной в неподвижной системе отсчета F . Когда частица движется, ее вектор координат r ( t ) отслеживает ее траекторию, которая представляет собой кривую в пространстве, задаваемую формулой:
где i , j и k - единичные векторы вдоль осей X , Y и Z системы отсчета F соответственно.
Рассмотрим частицу P, которая движется только по поверхности кругового цилиндра r ( t ) = constant, можно совместить ось Z неподвижной системы отсчета F с осью цилиндра. Затем угол θ вокруг этой оси в плоскости X - Y может использоваться для определения траектории как,

где постоянное расстояние от центра обозначено как R , а θ = θ ( t ) является функцией времени.
Цилиндрические координаты для r ( t ) можно упростить, введя радиальный и тангенциальный единичные векторы:

и их производные по времени из элементарного исчисления:




Используя эти обозначения, r ( t ) принимает вид

В общем, траектория r ( t ) не ограничивается круговым цилиндром, поэтому радиус R изменяется со временем, и траектория частицы в цилиндрическо-полярных координатах принимает вид:

Где R , θ и z могут быть непрерывно дифференцируемыми функциями времени, а обозначение функции опускается для простоты. Вектор скорости v P является производной траектории r ( t ) по времени, что дает:

Точно так же ускорение a P , которое является производной скорости v P по времени , определяется выражением:

Термин действует по направлению к центру кривизны траектории в этой точке траектории и обычно называется центростремительным ускорением. Этот термин называется ускорением Кориолиса.


Постоянный радиус
Если траектория частицы должна лежать на цилиндре, тогда радиус R постоянен, а векторы скорости и ускорения упрощаются. Скорость v P - это производная по времени траектории r ( t ),

Плоские круговые траектории
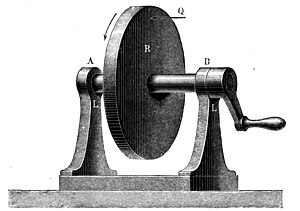
Каждая частица на колесе движется по плоской круговой траектории (Kinematics of Machinery, 1876).
Частный случай траектории частицы на круговом цилиндре возникает, когда нет движения вдоль оси Z :

где R и z 0 - постоянные. В этом случае скорость v P определяется как:

где - угловая скорость единичного вектора e θ вокруг оси z цилиндра.

Ускорение a P частицы P теперь определяется выражением:

Компоненты

называются соответственно радиальной и тангенциальной составляющими ускорения.
Обозначения для угловой скорости и углового ускорения часто определяют как

поэтому компоненты радиального и тангенциального ускорения для круговых траекторий также записываются как

Точечные траектории в теле, движущемся в плоскости
Движение компонентов механической системы анализируется путем прикрепления системы отсчета к каждой части и определения того, как различные системы отсчета перемещаются относительно друг друга. Если структурная жесткость деталей достаточна, то их деформацией можно пренебречь и использовать жесткие преобразования для определения этого относительного движения. Это сводит описание движения различных частей сложной механической системы к задаче описания геометрии каждой части и геометрической ассоциации каждой части относительно других частей.
Геометрия - это изучение свойств фигур, которые остаются неизменными, пока пространство трансформируется различными способами, а точнее говоря, это изучение инвариантов относительно набора преобразований. Эти преобразования могут вызвать смещение треугольника в плоскости, при этом угол вершины и расстояния между вершинами остаются неизменными. Кинематику часто называют прикладной геометрией, где движение механической системы описывается с использованием жестких преобразований евклидовой геометрии.
Координаты точек на плоскости - это двумерные векторы в R 2 (двумерное пространство). Жесткие преобразования - это те, которые сохраняют расстояние между любыми двумя точками. Множество жестких преобразований в n -мерном пространстве называется специальной евклидовой группой на R n и обозначается SE ( n ) .
Смещения и движение

Движение каждого из компонентов парового двигателя Boulton & Watt (1784) моделируется непрерывным набором жестких перемещений.
Положение одного компонента механической системы относительно другого определяется путем введения системы отсчета , скажем M , на одном, который движется относительно фиксированной системы отсчета, F, на другом. Жесткое преобразование или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации вращения и перевода .
Множество всех смещений М по отношению к F называется пространству конфигурации из M. гладкой кривой из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывный набор смещений, называется движение из M относительно F. движения тело состоит из непрерывного набора поворотов и поступлений.
Матричное представление
Комбинация вращения и переноса в плоскости R 2 может быть представлена определенным типом матрицы 3 × 3, известной как однородное преобразование. Однородное преобразование 3 × 3 строится из матрицы вращения 2 × 2 A ( φ ) и вектора сдвига 2 × 1 d = ( d x , d y ), как:
![{\ Displaystyle [Т (\ phi, \ mathbf {d})] = {\ begin {bmatrix} A (\ phi) & \ mathbf {d} \\\ mathbf {0} & 1 \ end {bmatrix}} = { \ begin {bmatrix} \ cos \ phi & - \ sin \ phi & d_ {x} \\\ sin \ phi & \ cos \ phi & d_ {y} \\ 0 & 0 & 1 \ end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
Эти однородные преобразования выполняют жесткие преобразования в точках плоскости z = 1, то есть в точках с координатами r = ( x , y , 1).
В частности, пусть г определяют координаты точек в системе отсчета М , совпадающей с неподвижной рамой F . Затем, когда начало координат M смещается на вектор переноса d относительно начала координат F и поворачивается на угол φ относительно оси x F , новые координаты в F точек в M задаются следующим образом:
![{\ displaystyle \ mathbf {P} = [T (\ phi, \ mathbf {d})] \ mathbf {r} = {\ begin {bmatrix} \ cos \ phi & - \ sin \ phi & d_ {x} \\ \ sin \ phi & \ cos \ phi & d_ {y} \\ 0 & 0 & 1 \ end {bmatrix}} {\ begin {bmatrix} x \\ y \\ 1 \ end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
Однородные преобразования представляют собой аффинные преобразования . Этот состав необходимо , потому что перевод не линейное преобразование из R 2 . Однако, используя проективную геометрию, так что R 2 считается подмножеством R 3 , трансляции становятся аффинными линейными преобразованиями.
Чистый перевод
Если твердое тело движется так, что его система отсчета M не вращается ( θ = 0) относительно неподвижной системы отсчета F , движение называется чистым переносом. В этом случае траектория каждой точки тела представляет собой смещение траектории d ( t ) начала координат M, то есть:
![{\ displaystyle \ mathbf {r} (t) = [T (0, \ mathbf {d} (t))] \ mathbf {p} = \ mathbf {d} (t) + \ mathbf {p}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)
Таким образом, для тел в чистом перемещении скорость и ускорение каждой точки P в теле задаются как:

где точка обозначает производную по времени и об O и в O являются скорость и ускорение, соответственно, о происхождении движущегося кадра M . Напомним, что координатный вектор p в M постоянен, поэтому его производная равна нулю.
Вращение тела вокруг фиксированной оси
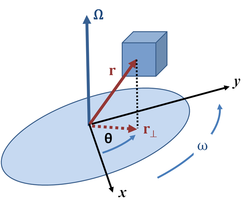
Рисунок 1: Вектор угловой скорости
Ω указывает вверх для вращения против часовой стрелки и вниз для вращения по часовой стрелке, как определено
правилом правой руки . Угловое положение
θ (
t ) изменяется со временем со скоростью
ω ( t ) = d θ / d t .
Вращательная или угловая кинематика - это описание вращения объекта. В дальнейшем мы ограничимся простым вращением вокруг оси фиксированной ориентации. Г Оу был выбран для удобства.
Позиция
Это позволяет описывать вращение как угловое положение планарной системы отсчета M относительно фиксированной F относительно этой общей оси z . Координаты p = ( x , y ) в M связаны с координатами P = (X, Y) в F матричным уравнением:
![{\ Displaystyle \ mathbf {P} (t) = [A (t)] \ mathbf {p},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
куда
![{\ Displaystyle [A (t)] = {\ begin {bmatrix} \ cos (\ theta (t)) & - \ sin (\ theta (t)) \\\ sin (\ theta (t)) & \ cos (\ theta (t)) \ end {bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
матрица вращения, которая определяет угловое положение M относительно F как функцию времени.
Скорость
Если точка p не движется в M , ее скорость в F определяется выражением
![{\ displaystyle \ mathbf {v} _ {P} = {\ dot {\ mathbf {P}}} = [{\ dot {A}} (t)] \ mathbf {p}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
Удобно исключить координаты p и записать это как операцию над траекторией P ( t ),
![{\ Displaystyle \ mathbf {v} _ {P} = [{\ точка {A}} (t)] [A (t) ^ {- 1}] \ mathbf {P} = [\ Omega] \ mathbf {P },}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
где матрица
![{\ displaystyle [\ Omega] = {\ begin {bmatrix} 0 & - \ omega \\\ omega & 0 \ end {bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)
известно как угловая скорость матрица М по отношению к F . Параметр ω - это производная по времени от угла θ, то есть:

Ускорение
Ускорение P ( t ) в F получается как производная по времени от скорости,
![{\ Displaystyle \ mathbf {A} _ {P} = {\ ddot {P}} (t) = [{\ dot {\ Omega}}] \ mathbf {P} + [\ Omega] {\ dot {\ mathbf {П} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
который становится
![{\ displaystyle \ mathbf {A} _ {P} = [{\ dot {\ Omega}}] \ mathbf {P} + [\ Omega] [\ Omega] \ mathbf {P},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
куда
![{\ displaystyle [{\ dot {\ Omega}}] = {\ begin {bmatrix} 0 & - \ alpha \\\ alpha & 0 \ end {bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)
- матрица угловых ускорений M на F , а

Затем описание вращения включает эти три величины:
-
Угловое положение : ориентированное расстояние от выбранной исходной точки на оси вращения до точки объекта - это вектор r ( t ), определяющий положение точки. Вектор r ( t ) имеет некоторую проекцию (или, что то же самое, некоторую компоненту) r ⊥ ( t ) на плоскость, перпендикулярную оси вращения. Тогда угловое положение этой точки - это угол θ от опорной оси (обычно положительной оси x ) к вектору r ⊥ ( t ) в известном направлении вращения (обычно задаваемом правилом правой руки ).
-
Угловая скорость : угловая скорость ω - это скорость, с которой угловое положение θ изменяется относительно времени t :

Угловая скорость представлена на рисунке 1 вектором Ω, направленным вдоль оси вращения с величиной ω и направлением, определяемым направлением вращения, заданным правилом правой руки .
-
Угловое ускорение : величина углового ускорения α - это скорость, с которой угловая скорость ω изменяется во времени t :

Уравнения поступательной кинематики можно легко расширить до плоской кинематики вращения для постоянного углового ускорения с простой заменой переменных:




Здесь θ i и θ f - соответственно начальное и конечное угловые положения, ω i и ω f - соответственно начальная и конечная угловые скорости, а α - постоянное угловое ускорение. Хотя положение в пространстве и скорость в пространстве являются истинными векторами (с точки зрения их свойств при вращении), как и угловая скорость, сам угол не является истинным вектором.
Точечные траектории движения тела в трех измерениях
Важные формулы кинематики определяют скорость и ускорение точек движущегося тела, когда они отслеживают траектории в трехмерном пространстве. Это особенно важно для центра масс тела, который используется для вывода уравнений движения с использованием второго закона Ньютона или уравнений Лагранжа .
Позиция
Чтобы определить эти формулы, движение компонента B механической системы определяется набором вращений [A ( t )] и перемещений d ( t ), собранных в однородное преобразование [T ( t )] = [A ( t ), d ( t )]. Если p - координаты точки P в B, измеренные в движущейся системе отсчета M , то траектория этой точки, отслеживаемая в F , задается следующим образом:
![{\ Displaystyle \ mathbf {P} (t) = [T (t)] \ mathbf {p} = {\ begin {bmatrix} \ mathbf {P} \\ 1 \ end {bmatrix}} = {\ begin {bmatrix} } A (t) & \ mathbf {d} (t) \\ 0 & 1 \ end {bmatrix}} {\ begin {bmatrix} \ mathbf {p} \\ 1 \ end {bmatrix}}.}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
Это обозначение не делает различий между P = (X, Y, Z, 1) и P = (X, Y, Z), что, надеюсь, понятно в контексте.
Это уравнение для траектории P можно инвертировать, чтобы вычислить вектор координат p в M как:
![{\ displaystyle \ mathbf {p} = [T (t)] ^ {- 1} \ mathbf {P} (t) = {\ begin {bmatrix} \ mathbf {p} \\ 1 \ end {bmatrix}} = {\ begin {bmatrix} A (t) ^ {T} & - A (t) ^ {T} \ mathbf {d} (t) \\ 0 & 1 \ end {bmatrix}} {\ begin {bmatrix} \ mathbf { P} (t) \\ 1 \ end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/12f1404724db4bcb9f3ecad4ce216fe4529b222d)
В этом выражении используется тот факт, что транспонирование матрицы вращения также является обратным ей, то есть:
![{\ Displaystyle [A (t)] ^ {T} [A (t)] = I. \!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/508984f6b63ea2650ace9fc734f8a7b511678db4)
Скорость
Скорость точки P вдоль ее траектории P ( t ) получается как производная по времени от этого вектора положения,
![{\ displaystyle \ mathbf {v} _ {P} = [{\ dot {T}} (t)] \ mathbf {p} = {\ begin {bmatrix} \ mathbf {v} _ {P} \\ 0 \ конец {bmatrix}} = \ left ({\ frac {d} {dt}} {\ begin {bmatrix} A (t) & \ mathbf {d} (t) \\ 0 & 1 \ end {bmatrix}} \ right) {\ begin {bmatrix} \ mathbf {p} \\ 1 \ end {bmatrix}} = {\ begin {bmatrix} {\ dot {A}} (t) & {\ dot {\ mathbf {d}}} ( t) \\ 0 & 0 \ end {bmatrix}} {\ begin {bmatrix} \ mathbf {p} \\ 1 \ end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
Точка обозначает производную по времени; поскольку p константа, его производная равна нулю.
Эта формула может быть изменена , чтобы получить скорость Р при работе на своей траектории Р ( т ) , измеренной в неподвижной раме F . Подставляя обратное преобразование для p в уравнение скорости, получаем:
![{\ displaystyle {\ begin {align} \ mathbf {v} _ {P} & = [{\ dot {T}} (t)] [T (t)] ^ {- 1} \ mathbf {P} (t ) \\ [4pt] & = {\ begin {bmatrix} \ mathbf {v} _ {P} \\ 0 \ end {bmatrix}} = {\ begin {bmatrix} {\ dot {A}} & {\ dot {\ mathbf {d}}} \\ 0 & 0 \ end {bmatrix}} {\ begin {bmatrix} A & \ mathbf {d} \\ 0 & 1 \ end {bmatrix}} ^ {- 1} {\ begin {bmatrix} \ mathbf {P} (t) \\ 1 \ end {bmatrix}} \\ [4pt] & = {\ begin {bmatrix} {\ dot {A}} & {\ dot {\ mathbf {d}}} \\ 0 & 0 \ end {bmatrix}} A ^ {- 1} {\ begin {bmatrix} 1 & - \ mathbf {d} \\ 0 & A \ end {bmatrix}} {\ begin {bmatrix} \ mathbf {P} (t) \ \ 1 \ end {bmatrix}} \\ [4pt] & = {\ begin {bmatrix} {\ dot {A}} A ^ {- 1} & - {\ dot {A}} A ^ {- 1} \ mathbf {d} + {\ dot {\ mathbf {d}}} \\ 0 & 0 \ end {bmatrix}} {\ begin {bmatrix} \ mathbf {P} (t) \\ 1 \ end {bmatrix}} \\ [4pt] & = {\ begin {bmatrix} {\ dot {A}} A ^ {T} & - {\ dot {A}} A ^ {T} \ mathbf {d} + {\ dot {\ mathbf { d}}} \\ 0 & 0 \ end {bmatrix}} {\ begin {bmatrix} \ mathbf {P} (t) \\ 1 \ end {bmatrix}} \\ [6pt] \ mathbf {v} _ {P} & = [S] \ mathbf {P}. \ End {выравнивается}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7355ba7b88326ca2833f7ca6be92f6012fdeffe3)
Матрица [ S ] определяется выражением:
![{\ displaystyle [S] = {\ begin {bmatrix} \ Omega & - \ Omega \ mathbf {d} + {\ dot {\ mathbf {d}}} \\ 0 & 0 \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
куда
![{\ displaystyle [\ Omega] = {\ точка {A}} A ^ {T},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0c3cd8274e1618399a3496683894c48cd3f7779c)
- матрица угловой скорости.
Умножая на оператор [ S ], формула для скорости v P принимает вид:
![{\ displaystyle \ mathbf {v} _ {P} = [\ Omega] (\ mathbf {P} - \ mathbf {d}) + {\ dot {\ mathbf {d}}} = \ omega \ times \ mathbf { R} _ {P / O} + \ mathbf {v} _ {O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)
где вектор ω - вектор угловой скорости, полученный из компонент матрицы [Ω]; вектор

- положение P относительно начала координат O подвижной системы отсчета M ; а также

есть скорость начала координат O .
Ускорение
Ускорение точки P в движущемся теле B получается как производная по времени от его вектора скорости:
![{\ displaystyle \ mathbf {A} _ {P} = {\ frac {d} {dt}} \ mathbf {v} _ {P} = {\ frac {d} {dt}} \ left ([S] \ mathbf {P} \ right) = [{\ dot {S}}] \ mathbf {P} + [S] {\ dot {\ mathbf {P}}} = [{\ dot {S}}] \ mathbf { P} + [S] [S] \ mathbf {P}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
Это уравнение можно сначала расширить, вычислив
![{\ displaystyle [{\ dot {S}}] = {\ begin {bmatrix} {\ dot {\ Omega}} & - {\ dot {\ Omega}} \ mathbf {d} - \ Omega {\ dot {\ mathbf {d}}} + {\ ddot {\ mathbf {d}}} \\ 0 & 0 \ end {bmatrix}} = {\ begin {bmatrix} {\ dot {\ Omega}} & - {\ dot {\ Omega }} \ mathbf {d} - \ Omega \ mathbf {v} _ {O} + \ mathbf {A} _ {O} \\ 0 & 0 \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
а также
![{\ displaystyle [S] ^ {2} = {\ begin {bmatrix} \ Omega & - \ Omega \ mathbf {d} + \ mathbf {v} _ {O} \\ 0 & 0 \ end {bmatrix}} ^ {2 } = {\ begin {bmatrix} \ Omega ^ {2} & - \ Omega ^ {2} \ mathbf {d} + \ Omega \ mathbf {v} _ {O} \\ 0 & 0 \ end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)
Формула для ускорения A P теперь может быть получена как:

или

где α - вектор углового ускорения, полученный из производной матрицы угловой скорости;
- вектор относительного положения (положение P относительно начала O подвижной системы отсчета M ); а также

является ускорение начала координат движущейся системы M .
Кинематические ограничения
Кинематические ограничения - это ограничения на движение компонентов механической системы. Можно считать, что кинематические ограничения имеют две основные формы: (i) ограничения, которые возникают из шарниров, ползунов и кулачковых соединений, которые определяют конструкцию системы, называемые голономными связями , и (ii) ограничения, накладываемые на скорость системы, такие как ограничение лезвия коньков на плоской плоскости или катание без проскальзывания диска или сферы в контакте с плоскостью, которые называются неголономными связями . Ниже приведены некоторые общие примеры.
Кинематическая муфта
Кинематическая муфта точно ограничивает все 6 степеней свободы.
Катится без скольжения
Объект, который катится по поверхности без скольжения, подчиняется условию, что скорость его центра масс равна произведению его угловой скорости на вектор от точки контакта к центру масс:

В случае объекта, который не наклоняется и не поворачивается, это сокращается до .

Неэластичный шнур
Это тот случай, когда тела связаны идеализированным шнуром, который остается натянутым и не может менять длину. Ограничение состоит в том, что сумма длин всех сегментов шнура равна общей длине, и, соответственно, производная по времени этой суммы равна нулю. Динамическая задача этого типа - маятник . Другой пример - барабан, который вращается под действием силы тяжести при падающем грузе, прикрепленном к ободу нерастяжимым шнуром. Задачей равновесия (т.е. не кинематической) этого типа является цепная связь .
Кинематические пары
Рило назвал идеальные связи между компонентами, образующими в машине кинематические пары . Он проводил различие между более высокими парами, которые, как утверждается, имеют линейный контакт между двумя звеньями, и нижними парами, которые имеют контакт по площади между звеньями. Дж. Филлипс показывает, что существует множество способов построения пар, которые не подходят для этой простой классификации.
Нижняя пара
Нижняя пара представляет собой идеальное соединение или голономную связь, которая поддерживает контакт между точкой, линией или плоскостью в движущемся твердом (трехмерном) теле с соответствующей точечной линией или плоскостью в неподвижном твердом теле. Возможны следующие случаи:
- Поворотная пара или шарнирное соединение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, поддерживала контакт с аналогичной перпендикулярной плоскостью. в неподвижном теле. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы, которая представляет собой чистое вращение вокруг оси шарнира.
- Призматический шарнир или ползун требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, поддерживала контакт с аналогичной параллельной плоскостью в движущемся теле. фиксированное тело. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы. Эта степень свободы представляет собой расстояние скольжения по линии.
- Цилиндрическое соединение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле. Это комбинация поворотного и скользящего шарниров. Этот сустав имеет две степени свободы. Положение движущегося тела определяется как вращением вокруг, так и скольжением вдоль оси.
- Сферический шарнир или шаровой шарнир требует, чтобы точка в движущемся теле поддерживала контакт с точкой в неподвижном теле. Этот сустав имеет три степени свободы.
- Плоское соединение требует, чтобы плоскость движущегося тела поддерживала контакт с плоскостью неподвижного тела. Этот сустав имеет три степени свободы.
Высшие пары
Вообще говоря, пара более высокого уровня - это ограничение, которое требует, чтобы кривая или поверхность в движущемся теле сохраняла контакт с кривой или поверхностью в неподвижном теле. Например, контакт между кулачком и его толкателем представляет собой более высокую пару, называемую кулачковым шарниром . Точно так же контакт между эвольвентными кривыми, которые образуют зубья зацепления двух шестерен, представляют собой кулачковые соединения.
Кинематические цепи
Жесткие тела («звенья»), соединенные кинематическими парами («шарнирами»), известны как кинематические цепи . Механизмы и роботы являются примерами кинематических цепей. Степень свободы кинематической цепи вычисляется из числа звеньев и количества и типа соединений , используя формулу мобильности . Эта формула также может использоваться для перечисления топологий кинематических цепей, которые имеют заданную степень свободы, что в машиностроении известно как синтез типов .
Примеры
Плоские одной степени свободы из- связей , собранные из N звеньев и J шарниров или скользящих соединений являются:
- N = 2, j = 1: двухзвенная навеска - рычаг;
- N = 4, j = 4: четырехзвенная навеска ;
- N = 6, j = 7: шестиконечная навеска . Он должен иметь две связи («тройные связи»), которые поддерживают три сустава. Есть две различные топологии, которые зависят от того, как связаны две тройные связи. В топологии Ватта два тройных звена имеют общий стык; в топологии Стефенсона две тройные связи не имеют общего соединения и связаны двоичными связями.
- N = 8, j = 10: восьмизвенная связь с 16 различными топологиями;
- N = 10, j = 13: связь с десятью стержнями с 230 различными топологиями;
- N = 12, j = 16: связь с двенадцатью стержнями с 6 856 топологиями.
Для более крупных цепей и их топологий связей см. RP Sunkari и LC Schmidt, «Структурный синтез плоских кинематических цепей путем адаптации алгоритма типа Маккея», Mechanism and Machine Theory # 41, pp. 1021–1030 (2006).
Смотрите также
использованная литература
дальнейшее чтение
-
Koetsier, Teun (1994), «§8.3 Кинематика», в Grattan-Guinness, Ivor (ed.), Companion Encyclopedia of the History and Philosophy of the Mathematical Sciences , 2 , Routledge , pp. 994–1001, ISBN 0-415-09239-6
-
Луна, Фрэнсис К. (2007). Машины Леонардо да Винчи и Франца Рило, кинематика машин от Возрождения до 20 века . Springer. ISBN 978-1-4020-5598-0.
-
Эдуард Этюд (1913), переводчик Д.Х. Дельфениха, "Основы и цели аналитической кинематики" .
внешние ссылки













